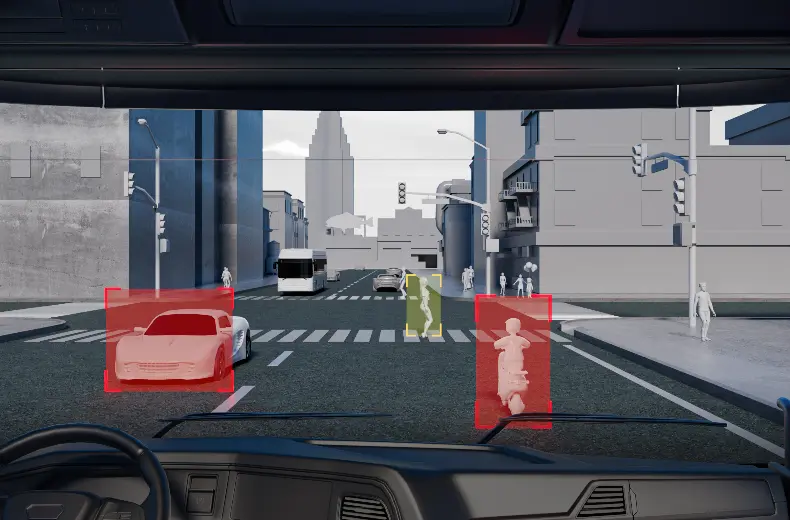
GSR通用安全法规套件
查看更多
















01
02
03
04
05
06
07
08